|
|
Номер команды: ТАР-016
"Пионер"
Творческая категория. Тема "Робот и живая природа" (Arduino).
- участник всероссийского этапаКоманда: Эврика
Регион: Московская Область
Город: Троицк
Название ОУ: Муниципальное автономное общеобразовательное учреждение «Средняя общеобразовательная школа №2»
Руководитель команды: Тихонов Николай Анатольевич
Оператор №1: Арбанас Левко
Оператор №2: Кравцов Денис
Зарегистрировал робота: Тихонов Николай Анатольевич
|
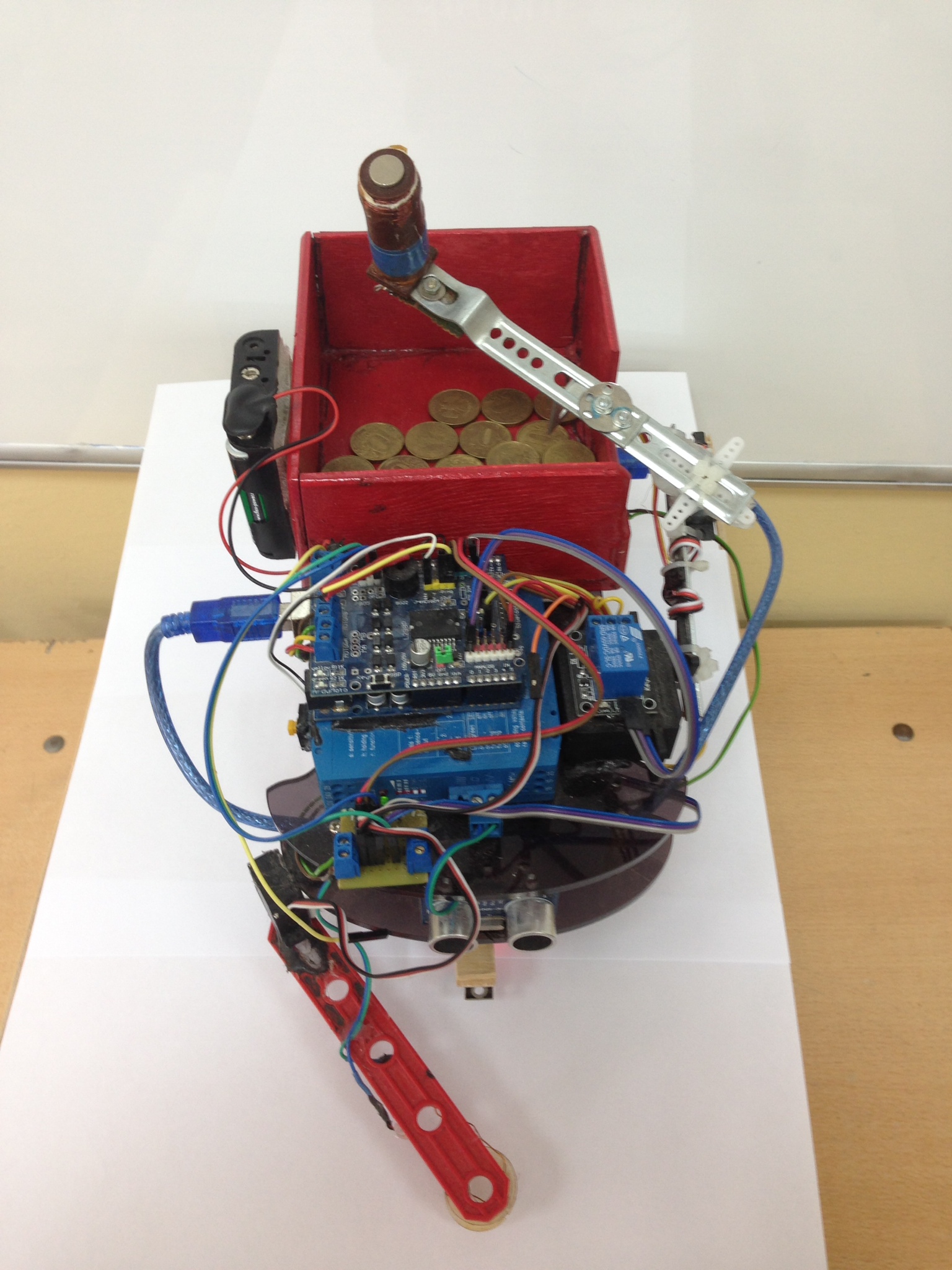
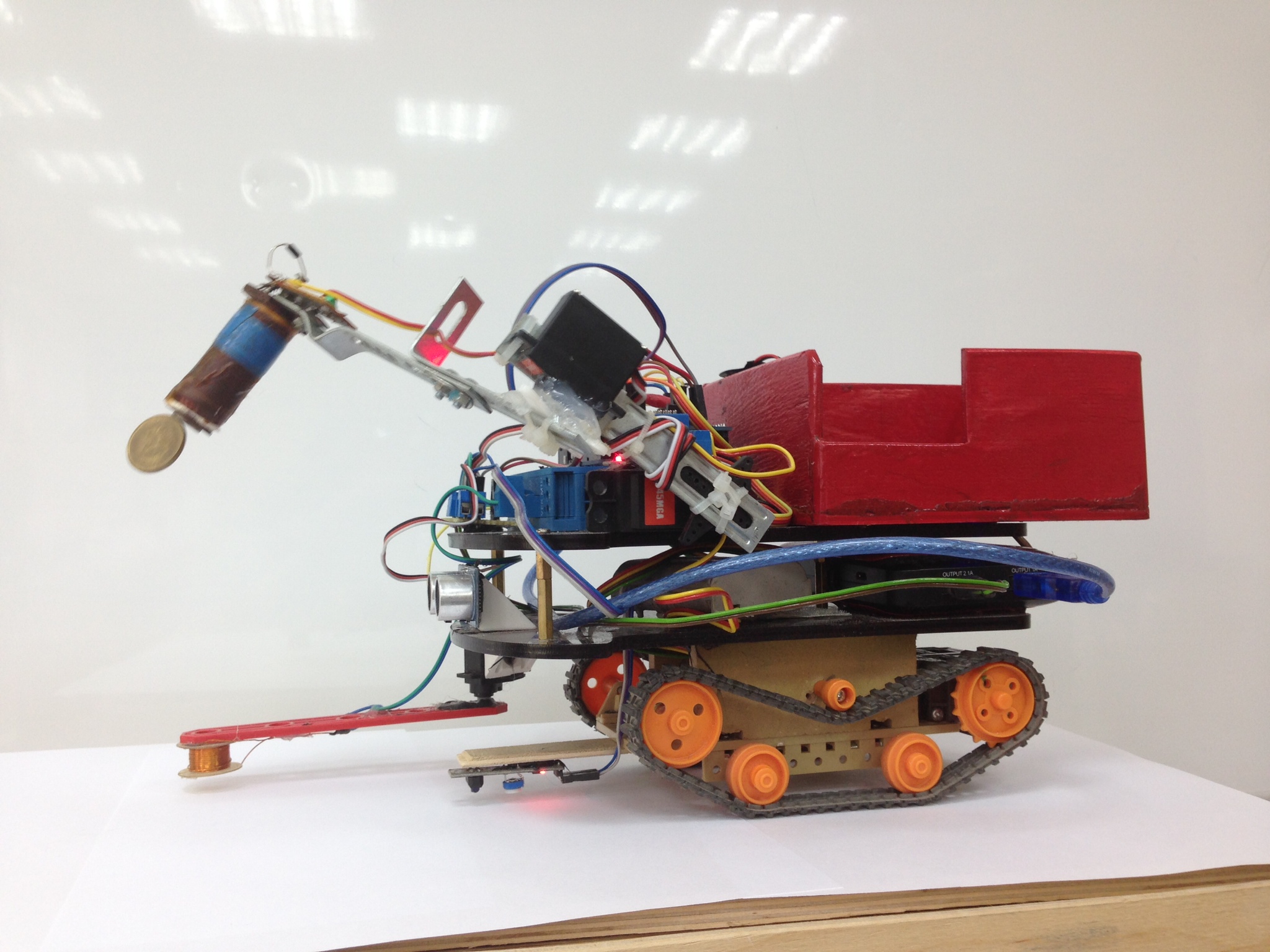
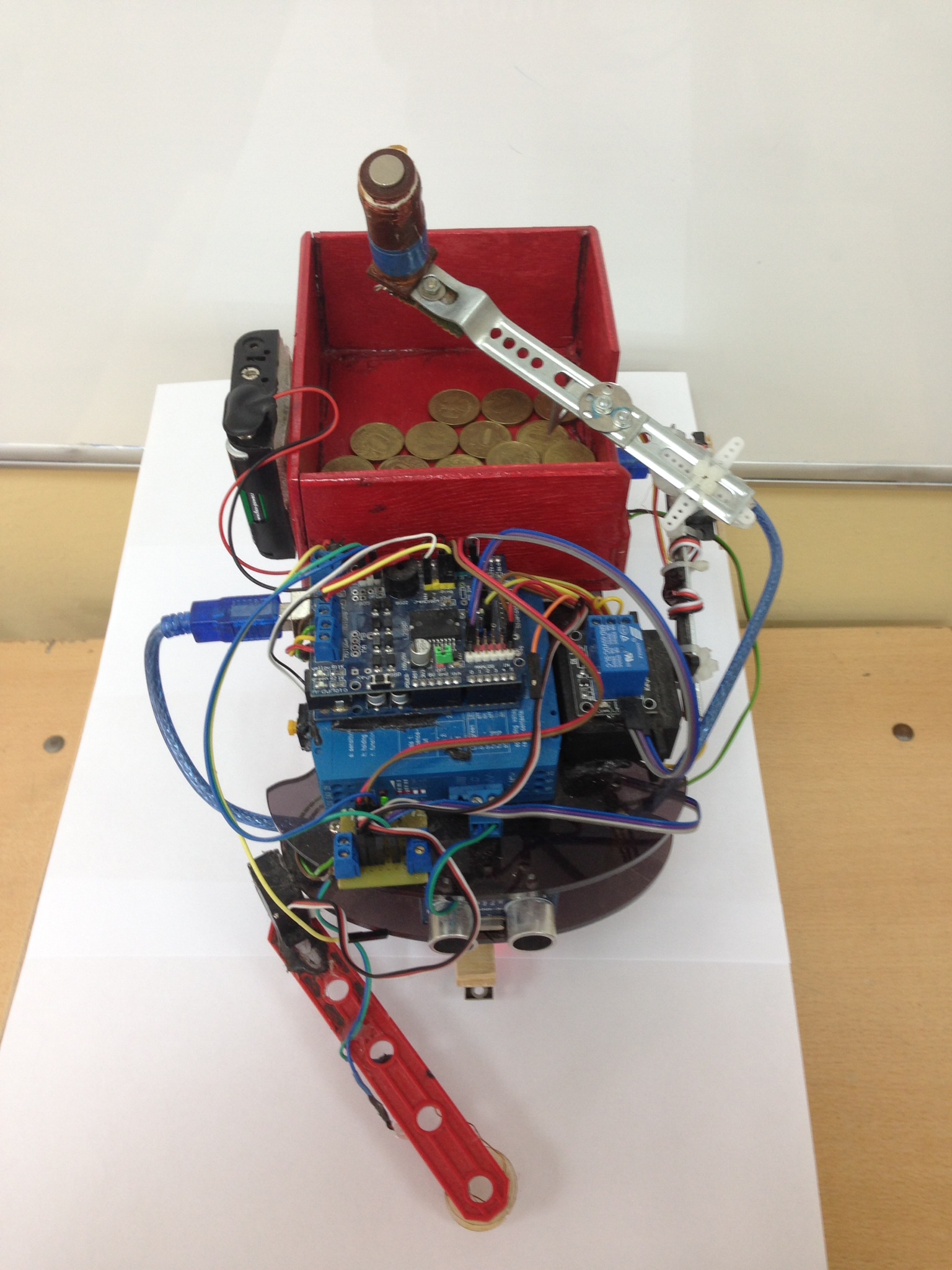
Описание:Основополагающий и проблемный вопрос: проблема загрязнения обрабатываемых площадей в сельском хозяйстве металлическими отходами.Цель работы: создание автономной роботизированной платформы (РП) для поиска и удаления металлических отходов. Мы создали модель робота, для автоматического поиска и сбора металла для дальнейшего его использования в интересах государства. Принцип действия:Задачей модели робота является движение по площадке и поиск металла при помощи металодетектора. При обнаружении электромагнит на манипуляторе перемещает металл в контейнер, после чего робот продолжает движение. В сложных ситуациях возможен переход на ручное управление с устройства на ОС Android программой “Bluetooth RC Controller” через Bluetooth соединение.Технические характеристики:Размеры робота (длина x ширина x высота): 340 мм х 240 мм х 200 ммРазмер демонстрационного поля : 2 м х 2 м Состав робота: • Arduino UNO • Драйвер моторов L298P • Сервопривод Impact IS45MGA • Сервопривод Impact IS17HMB • Сервопривод Impact IS9HMB • Электромагнит • Реле • ИК датчик линии • Компас LSM303DLH • Модуль Bluetooth BC417 • Гусеницы Tamiya 70100 • редуктор Tamiya 70168 • Аккумулятор Defender ExtraLife 10400 • Батарейный отсек 3хАА • Батарейный отсек 4хАА |